





Seaglider is a family of buoyancy driven autonomous underwater vehicles developed at the University of Washington. The IOP group at APL-UW has been leading that development for fifteen years and as of the beginning of 2023 is expanding its capability to directly support the community with software updates, technical support, maintenance, and new vehicles.
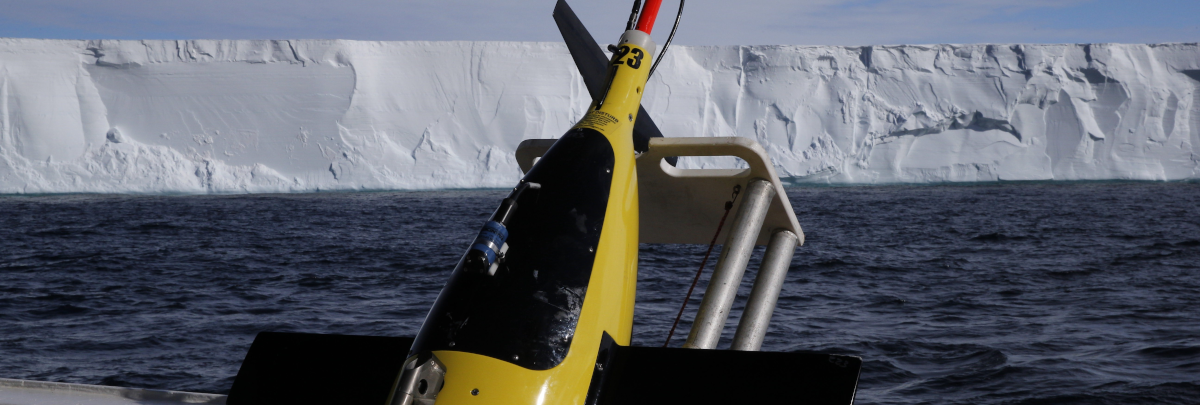
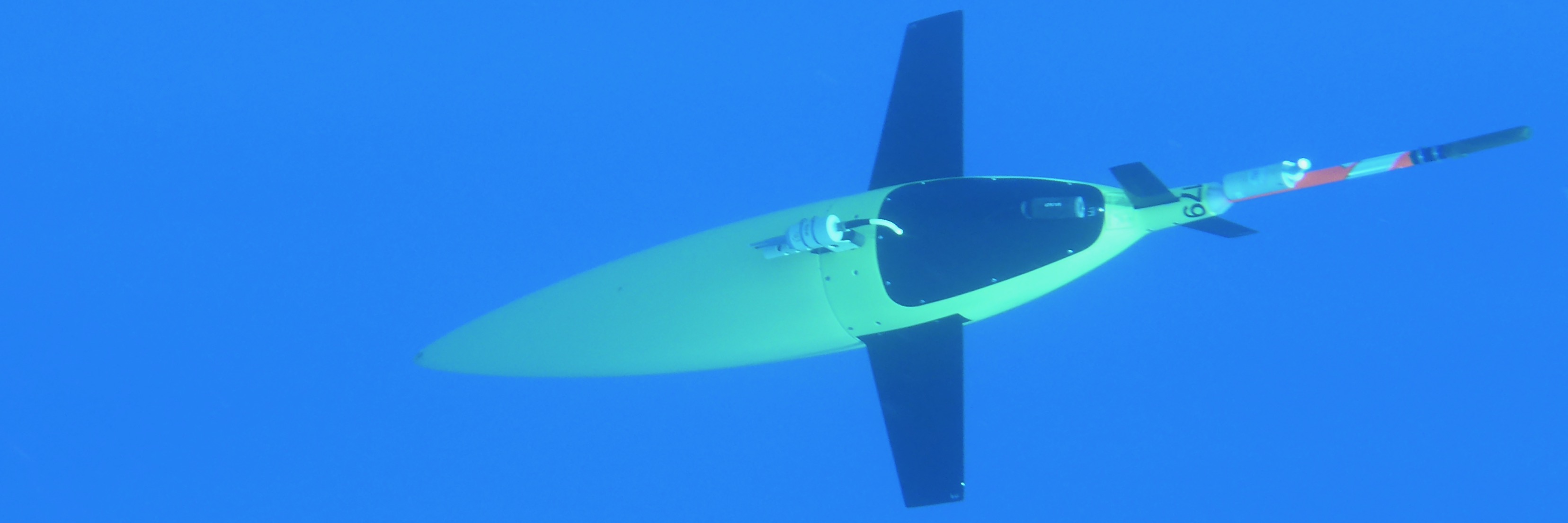
New vehicles will be our latest generation SGX, with 60% more battery capacity and more flexible payload options compared to earlier generations of the vehicle. Nominal displacement is 70kg. SGX uses the same ogive aft fairing as Seaglider but replaces the tapered forward fairing with a cylindrical mid-body fairing and a removable forward nose fairing. SGX is our team’s workhorse vehicle and has completed multiple year-long missions, including over-winter, under-ice Arctic deployments (longest is actually two winters, 22 months).
The current generation of vehicles are 15V univolt (replacing the original 10V/24V split rail architecture), use an ARM-based Rev E motherboard (replacing the TT8-based Rev B boards), an optional independent ARM-based science processor/controller (scicon), RBR Legato CTD, MCBH bulkhead connectors (replacing IE55), selectable magnetic or shorting plug on/off with software power off, and maintenance access from both forward and aft endcaps. Two sensor channels can be teed to both glider and scicon, offering options for fault tolerance and payload handling.
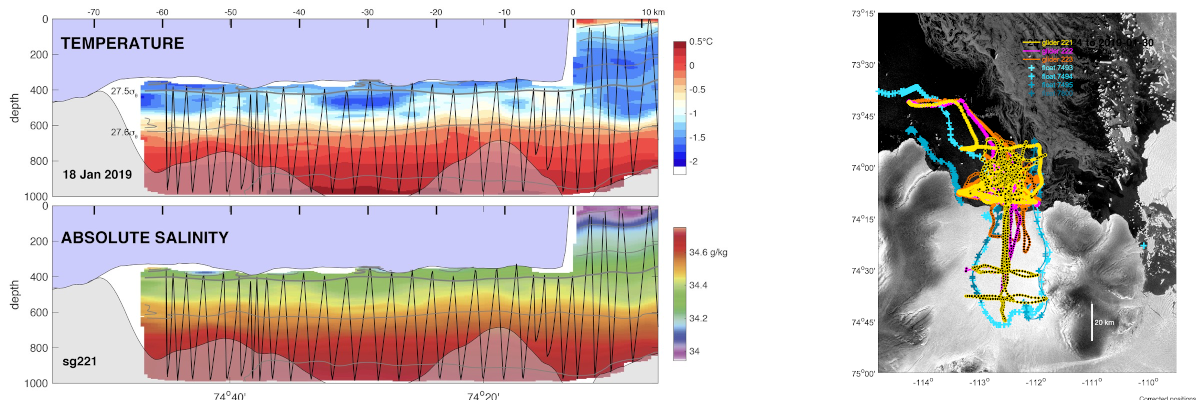
The latest glider firmware features improved mission scripting and autonomy, onboard automatic compass calibration, onboard automatic pitch and VBD trim, under-ice navigation and behaviors, more targeting options (fences, progress timeouts), improved depth loitering, more robust Iridium file transfer protocols (significantly reducing the need for file resends), new options to reduce upload sizes (primarily for under-ice backlog but maybe useful in other scenarios), and more. Early versions of some of these developments enabled our successful year-long missions to explore under and in front of Dotson ice shelf through an Antarctic winter, with current developments motivated by our work in the Arctic.
Basestation v3, released May 2023 under a BSD open-source license (https://github.com/iop-apl-uw/basestation3), represents a significant effort to improve QC handling and DAC submission, update to Python3, basestation-generated plots (removing any dependence on Matlab), automated flight model processing, and an entirely new web-based piloting and visualization application. The app is flexible and scalable. It works for a single pilot running a single mission over an SSH tunnel, requiring no additional database, web server, or firewall opening. It can also be run as a multi-user (or multi-institution even) piloting application with fine grained control of authentication and privileges, or as a public-facing web presence with no piloting features enabled. See seaglider.pub for examples of the new visualization capabilities.
Our development work focuses on the ARM branch of the firmware and basestation v3. We encourage users to upgrade and will help facilitate those upgrades. We are providing a basestation server, running v3, including visualization and piloting, in the cloud at no cost to users (see below). Basestation v3 software supports gliders running older versions of firmware and alternative sensors, and we will continue to work with users on compatibility issues.
We will offer updates for Rev B up to our last mission-proven version of that firmware, with the additional possibility of bug fixes. Note that we do anticipate subtle differences between our version of the code and what vendors may have deployed. Our code has always been the basis for every version of Seaglider, with licensees (iRobot/Kongsberg/Hydroid/HII) making minor changes. Where those changes offer significant support not otherwise available in the current version, we will work with users to try to find a path forward.
New central resources page for documentation and support links.
- Rev B TT8 firmware (generally user upgradeable)
- update to IGRF 2020 for magnetic fields
- support AAE firmware v3.08
- new controls for loitering at depth
- basic exec functionality (see below)
- ice avoidance
- RAFOS acoustic navigation
- linear fits to multiple altimeter pings for more reliable detections and to detect surface or bottom from arbitrary point in water column
- option to automatically go through selftest and then launch sequence on power up
- fix date from GPS in the presence of roll-over bug before syncing TT8 clock
- add power-policy to serdev to support RBR Legato as serdev
- Rev E firmware (generally user upgradeable) - everything in Rev B plus
- latest exec functionality (see below)
- named batch file execution at state changes (surface, apogee, etc.)
- one directory per dive to reduce clutter in root directory and speed file ops
- software shutdown via menu option
- option to launch negatively buoyant (leave surface immediately) with pressure activation to mark start of dive
- optional onboard automatic C_VBD adjustment
- optional onboard automatic C_PITCH adjustment
- retain auto adjusted roll centers dive over dive
- optional onboard calculation of compass magnetic coefficients
- new epdos functions: mv, grep, scuttle, wipe (the disk), etc.
- auto adjust SM_CC when auto adjusting C_VBD if SM_CC was set to pump to max (so that it still pumps to max)
- batch up files in raw transfer mode
- add checksum and size check to raw transfer protocol
- fix dir so that dirfile is not needed for capturing
- new $FILE directive in cmdfile to allow optional one file piloting (include science, targets, etc. in cmdfile)
- generate and optionally send compressed log and T-S profile data, and optionally do not send full size log and eng files. Reduces upload to typically less than 1kB. Requires scicon for T-S profile generation.
- switch to ymodem (including batch) for most things that used to use xmodem
- never use flow control for cmdfile, allowing for safe flight without NOCOMM_ACTION & 32 and flipping out of raw protocol when Iridium comms are poor
- change COMM_SEQ behavior for more control. Changed behavior is not backward compatible for the same setting.
- support for pressure via dedicated serial sensor
- support for pressure via attached science sensor (e.g., Legato)
- report installed cnf files during selftest
- make better use of processor speed-ups for filesystem intensive ops
- add deadband to final position of SM pump to reduce unnecessary retries to get to the last tenth of a cc
- record sealevel pressure values from all attached pressure sensors
- Rev E supervisor - Note that supervisor firmware is not user upgradeable. It will likely require that motherboards make a trip to UW for supervisor updates. Supervisor firmware changes much more slowly than main processor firmware. Currently we are maintaining multiple versions of glider firmware, including a version that is compatible with the older supervisor firmware originally installed on HII produced motherboards. This makes it possible to update glider firmware on older motherboards without needing to update supervisor firmware.
- fix bug with time keeping while powered off that causes too much power to be charged to fuel gauge
- track powered off time
- re-order the latching of the supervisor reset source for better reporting
- configurable reed or shorting plug on/off
- RTC clock improvements
- support for software command power down
- reduce spiking in analog conversions (pressure)
- Garmin GPS-15xH firmware (user upgradeable through the glider)
- firmware update and procedure available for updating older Garmin GPS units that have the roll-over bug
- AAE transponder v3.08 (not user upgradeable, likely requires that the OEM deck make a trip to UW)
- software selectable override of rotary switch setting for interrogate and reply frequencies
- software queryable interrogate and reply frequencies (including switch settings)
- transponder force off via software control
- Basestation v3
- update to use Python3
- Python installation does not affect system installed python version
- automatically run the flight model and produce plots and suggestions for hydrodynamic parameters throughout the mission
- templates to help you prepare your data for submission to DACs
- better integration and support for various sensor naming conventions and backwards compatibility
- use a SQL database in parallel with netCDF structures for ease of searching and access for many use cases
- full set of pilot plots, including plotly interactive plots, generated completely in python. No day-to-day dependence on any matlab tools.
- new visualization app to replace basestation matlab based pilot tools and serve as a full fledged web front end
- RBR Legato CTD sensor support
- Optional removal of uploaded command files (targets, science, pdoscmds.bat) after successful update to glider
- Option to run basestation processes in pilots user context
- Option to run glider/basestation interactions in a chroot jail for improved server security
- SciCon firmware (user upgradeable)
- add, drop, average, decimate columns for telemetry (original data always stored)
- derive columns using mathetical expressions for telemetry
- custom driver support for AD2CP
- generate very compact T-S profiles from Legato or SBE CT data
- arbitrary scale and offset for any column to change units or fix a calibration during deployment
- ability to send script files to arbitrary instrument (with the usual pause/send/expect/interpolated string functionality)
- fix some limitations with start, stop, and query strings
- lengthen timeout for "log meta" (AD2CP and Legato can take a long time)
As part of our new support arrangements, all released firmware will come with features for under-ice missions with acoustic navigation. This includes RAFOS-based multilateration for position; ice avoidance based on temperature thresholding, altimeter detections, zero velocity, and seasonal/climatological ice maps; and mission scripting and control via the "exec" subsystem. The exec system allows an operator to construct a decision tree for glider control via changing cmdfile, targets, science, etc. in the familiar way, but via an automated mechanism executed completely on the glider without pilot intervention. Decision points on the tree can be based on numbers of dives, absolute or relative calendar dates, observed engineering variables, or target achievement (/timeout/too slow progress toward/...). A typical scenario might be to have the glider hold at a central location with long loiters at depth to preserve energy and once per month execute a section out and back or to another hold point. If while holding position the glider moves outside some watch circle, the exec system switches over to a branch that directs the glider to swim back (without loiter dives) to the central location. Once the central target is achieved, the glider switches back to long loiter dives until it next falls out of the watch circle or reaches a calendar point. Once battery voltage or a fuel gauge threshold are reached, the glider could try to swim in the direction of the most likely open water. For Antarctic ice shelf work we used scenarios that automatically controlled the approach to the face of the shelf, and then the routes and patterns that the glider executed while under the shelf, with timeout behaviors and bailout settings all defined as nodes or branches in the exec system.
IOP is running a basestation server in the cloud, seaglider.pub, for community use. This is available to all operators. There is no charge for the service. We hope that it meets the needs of a broad variety of users, but of course there are numerous viable alternatives for basestation support. Please inquire if you would like a copy of the policy for basestation use to determine if the community basestation will work for you. RUDICS is the only means of operational connection and operators will need to either bring their own RUDICS account or use SIM cards from our RUDICS account provider (CLS). Limited dialup service via PSTN is available for testing purposes.
IOP is currently producing and delivering SGX gliders. As of early 2025, anticipate lead-times of 9-12 months.
Seaglider is able to support a wide range of sensors. For our own research we routinely fly RBR Legato CTD or Sea-Bird unpumped CTD, Wetlabs optical, Aanderaa optode, Nortek AD2CP, Satlantic irradiance, Rockland microstructure, RBR optical sensors, and passive acoustics (our own internally developed PMAR system). Other members of the community have developed integrations for numerous additional sensors.
For new glider deliveries the standard payload is Legato, optical puck, and optode oxygen, but we can integrate any of the commercially available sensors listed above. In addition, the intention of the hardware ports, serdev, logdev and scicon interfaces, and the basestation extension architecture has always been that sensors on Seaglider would be configurable and installable by the end-user.
RBR’s Legato CTD is a good option for the core sensor in either new gliders or as an update to an existing glider for the following reasons:
- Low power consumption
- Sampling rates of up to 4 Hz
- Ease of handling and return/reinstall for calibration
- Redundant depth sensor for fault tolerance
Legato is fully supported on the glider via scicon and/or a serdev .cnf configuration, and in basestation v3. We would be happy to share our experiences regarding data quality and the comparisons we have done against other sensors.
- Motherboard E.1.6 (relative to E.1.5)
- Ribbon header to support Iridium-GPS RF module
- Better handling of FORCEOFF/FORCEON on more sensor serial ports to address autoshutdown handshake problems
- Address some parts obsolescence
- Dedicated connector for capacitive coupling to seawater ground
- Tailboard combi rev 9 (relative to original two board rev E solution)
- Combines all functionality and ribbon headers onto one board
- Electrically tees serial 5D between mainboard and a logger (scicon)
- Electrically tees CT frequency channels between mainboard and a logger (scicon)
- Scicon B.0
- Updates for BOM simplification and parts obsolescence
- Fixes potential problems with insufficient copper on some traces
- Changes main comm connector for better compatibility
- Aux compass B.5 (replaces Sparton)
- Integrates compass and pressure acquisition or can be used for just compass or just pressure.
- Configurable averaging and orientation
- Low power consumption
- Iridium-GPS A.7 (replaces A3LA-RS, Garmin GPS-15xH, RF relay)
- Combines all RF functionality onto a single board to simplify cabling. Connected via one ribbon cable and no internal RF cables (other than from the antenna bulkhead)
- Logic level serial communications to reduce power consumption
- Faster, lower power GPS module
- More efficient power handling for Iridium modem module to reduce power consumption
As part of our stabilization and transition, SGX will be the only new vehicle offered. We are in the process of bringing a new 3000m vehicle online, DGX, and expect its first flight in 2025. We have retained the knowledge base and capability to build DeepGlider and are tracking requests for additional DG vehicles. Over the coming year we will assess demand, look at where DGX might broadly fit, and consider our production bandwidth to determine which directions we pursue for deep vehicles.